









Iterative Closest Point (ICP) is a widely used classical computer vision algorithm for 2D or 3D point cloud registration. As the name suggests it iteratively improves and minimizes the spatial ...
Latest From the Blog
MedSAM2 Explained: One Prompt to Segment Anything in Medical Imaging
Evening rush hour, a small country hospital, the scan room hums like an old fridge while a tired doctor checks the last patient of the day - a farmer who fell off his tractor and now finds it hard to ...
Batch Normalization and Dropout: A Combined Regularization Approach
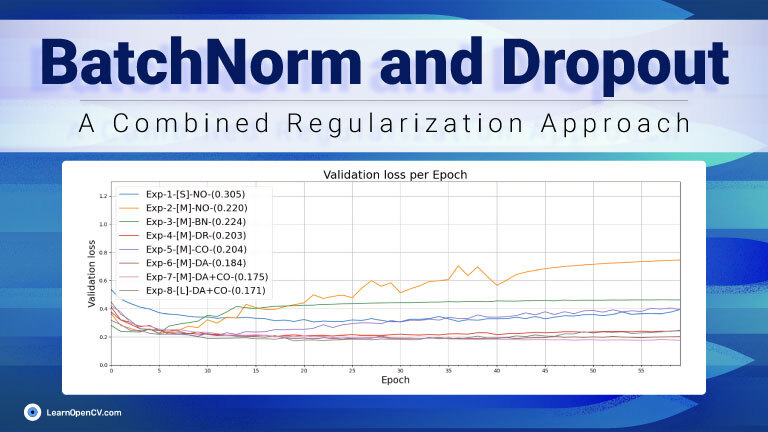
In Deep Learning, Batch Normalization (BatchNorm) and Dropout, as Regularizers, are two powerful techniques used to optimize model performance, prevent overfitting, and speed up convergence. While ...
DINOv2 by Meta: A Self-Supervised foundational vision model
The field of computer vision is fueled by the remarkable progress in self-supervised learning. At the forefront of this revolution is DINOv2, a cutting-edge self-supervised vision transformer ...
Beginner’s Guide to Embedding Models
As artificial intelligence continues to advance, Embedding Models have become fundamental to how machines interpret and interact with unstructured data. By translating inputs like text, images, audio, ...
MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors
MASt3R-SLAM is a truly plug and play monocular dense SLAM pipeline that operates in-the-wild. It is first of its kind real-time SLAM system that leverages MASt3R's 3D Reconstruction priors to achieve ...

