Iterative Closest Point (ICP) is a widely used classical computer vision algorithm for 2D or 3D point cloud registration. As the name suggests it iteratively improves and minimizes the spatial
In this post, you will learn how classical computer vision techniques can be used to create a Document Scanning Application and how it can be deployed on Streamlit.
Have you ever wondered how robots navigate autonomously, grasp different objects, or avoid collisions while moving? Using stereo vision-based depth estimation is a common method used for such applications. In
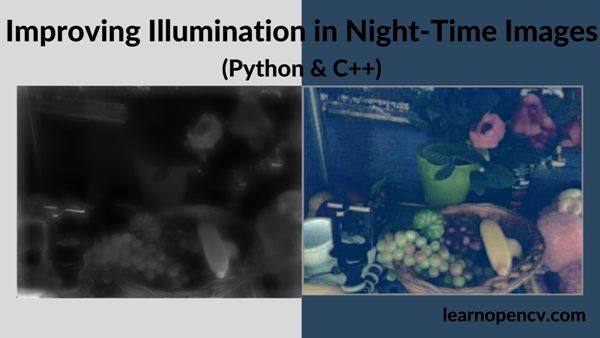
Introduction Taking good pictures in poor lighting conditions can seem like magic to non-photographers. It takes a combination of skill, experience and the right equipment to accomplish low light photography.
In this post, we will learn how to create a custom low-cost stereo camera (using a pair of webcams ) and capture 3D videos with it using OpenCV. We provide
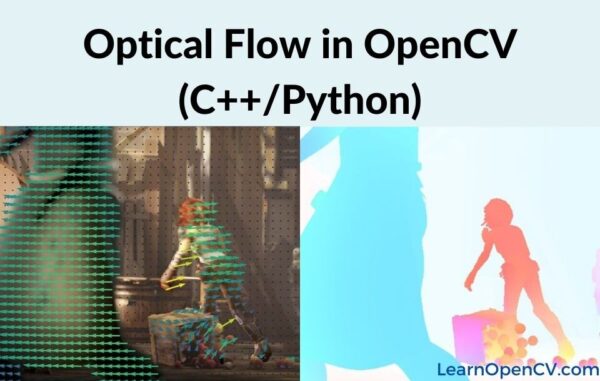
In this post, we will learn about the various algorithms for calculating Optical Flow in a video or sequence of frames. We will discuss the relevant theory and implementation in
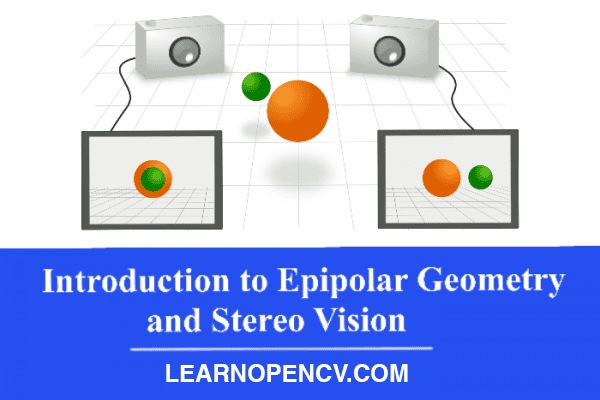
We will learn the concepts of Epipolar geometry and point correspondences. We will then use these concepts discuss how to calculate depth from stereo disparity.
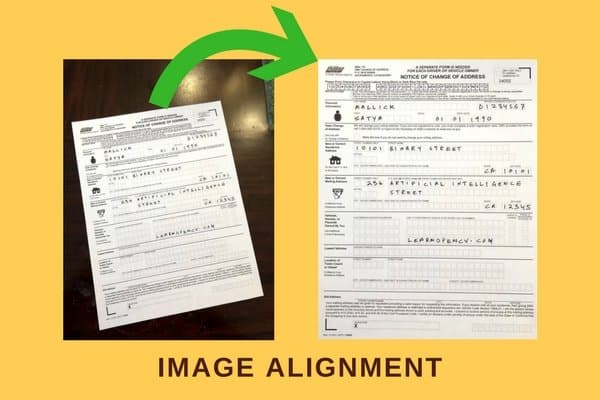
In this post, we will learn how to perform feature-based image alignment using OpenCV. We will share code in both C++ and Python. We will demonstrate the steps by way
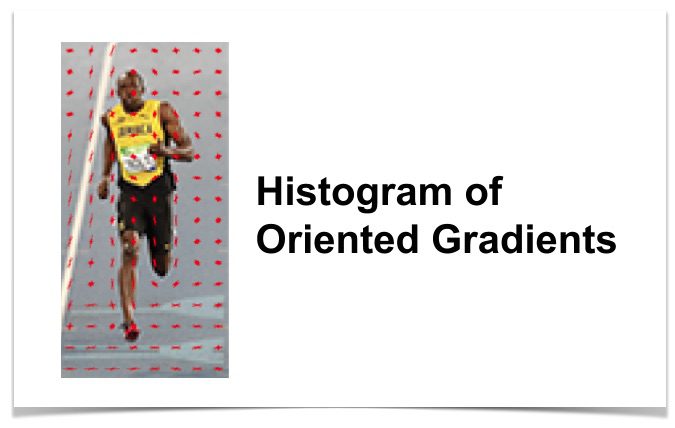
In this post, we will learn the details of the Histogram of Oriented Gradients (HOG) feature descriptor. We will learn what is under the hood and how this descriptor is
Terms like “Homography” often remind me how we still struggle with communication. Homography is a simple concept with a weird name! In this post we will discuss Homography examples using