In recent years, the field of 3D from multi-view has become one of the most popular topics in computer vision conferences, with a high number of submitted papers each year.
This articles discussed Training 3D U-Net for Brain Tumor Segmentation - BraTS2023. Glioma Detection It touches upon the importance of 3D U-Net over 2D U-Net for MRI Brain Scans.
The article primarily discusses capabilities Sapiens a foundational human vision model by meta, achieves state-of-the-art performance in tasks like 2D pose estimation, body-part segmentation, normal and depth estimation.
LiDAR SLAM is a crucial component in robotics perception, widely used in both industry and academia for its efficiency and robustness in localization and mapping. In robotics perception research, LiDAR
CVPR 2024 showcased groundbreaking AI and computer vision research, highlighting generative image dynamics, advanced 3D modeling, and innovative video editing techniques. OpenCV featured prominently, presenting OpenCV5 and collaborating with leading
Introduction to Monocular SLAM: Have you ever wondered how Tesla’s Autonomous Vehicle views its surroundings and understands its position, and makes smart decisions to reach its target location? Well, the
Depth Anything uses monocular depth perception technique to perceive depth. In this research article, the architecture along with inference results and mathematical expressions have been explored.
In this definitive research experiment, we will comprehensively focus on training a keypoint feature pyramid network for 3D LiDAR Object Detection using KITTI 360 Vision point-clouds for autonomous driving with
In this definitive research article, we will comprehensively focus on visualizing 3D LiDAR sensor data and try to gain an in-depth understanding of the 3D point cloud representation system for
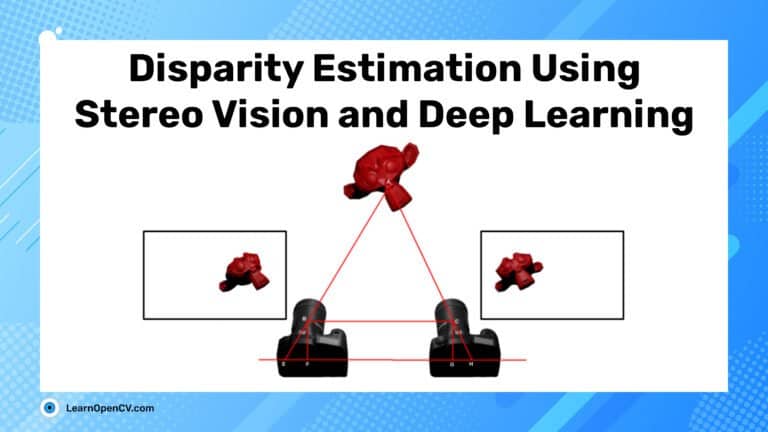
A conventional video or picture captures the three-dimensional world in two dimensions, losing crucial information regarding depth, which many applications now demand. Depth estimation is a challenging problem, and there