SAM 3D is Meta’s groundbreaking foundation model for reconstructing full 3D shape, texture, and object layout from a single natural image. Learn how it works.
Iterative Closest Point (ICP) is a widely used classical computer vision algorithm for 2D or 3D point cloud registration. As the name suggests it iteratively improves and minimizes the spatial
MedSAM2 brings “segment anything” power to healthcare, carving organs, tumours, and even moving heart chambers from CT, MRI, PET, and live ultrasound with a single prompt. Running in < 1
MASt3R-SLAM is a truly plug and play monocular dense SLAM pipeline that operates in-the-wild. It is first of its kind real-time SLAM system that leverages MASt3R’s 3D Reconstruction priors to
3D Reconstruction from traditional SfM, MVS is time consuming and involves complex intermediary steps. VGGT (Visual Geometry Grounded Transformer) outperforms DUSt3R and MASt3R in multiple benchmarks achieving SOTA results.
MASt3R (Multi View Stereo 3D Reconstruction) is a 3D aware image matches that grounds image matching as a 3D task to establish better correspondence. In this article, we will understand
DUSt3R (Dense and Unconstrained Stereo 3D Reconstruction) introduces a novel paradigm in multi-view 3D reconstruction, eliminating the need for predefined camera poses and intrinsics. In this article let's understand DUSt3R
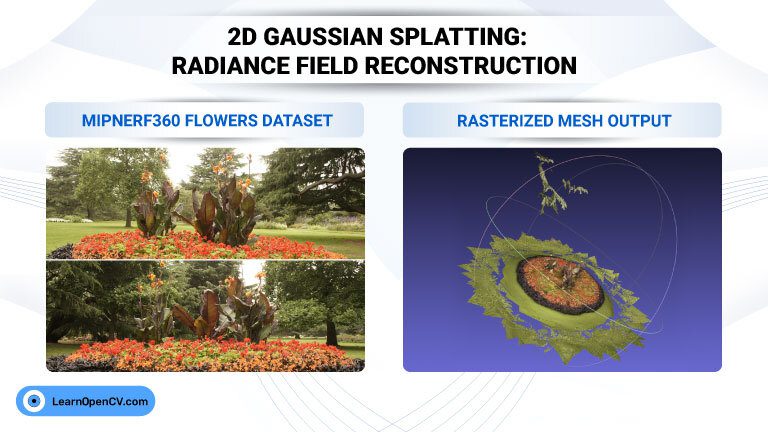
3D Gaussian splatting (3DGS) has recently gained recognition as a groundbreaking approach in radiance fields and computer graphics. It stands out as a jack of all trades, addressing challenges that
Apple's DepthPro is quite impressive, producing pixel-perfect, high-resolution metric depth maps with sharp boundaries through monocular depth estimation. It outperforms all of its contenders like Metric3D v2 and DepthAnything in
3D Gaussian Splatting (3DGS) is redefining the landscape of 3D computer graphics and vision — but here’s a catch: it achieves groundbreaking results without relying on any neural networks, not